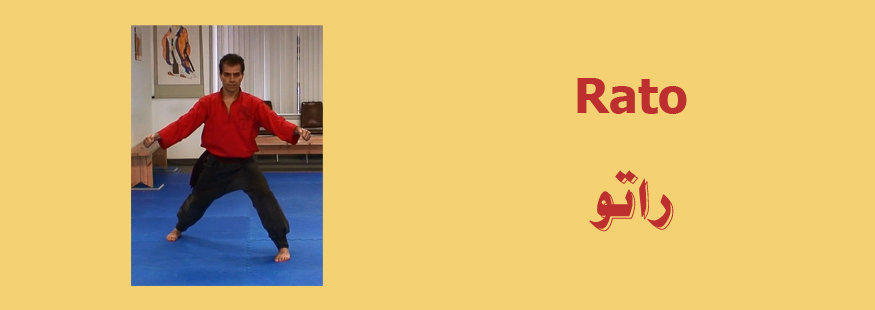
کامی سما

تشریح کامیسما فرد هنرجو به حالت ایستاده قرار میگیرد طوری که پاها کاملا کشیده، فاصله آنها از همدیگر از پنجه به اندازه پیشانی و از پاشنه به اندازه شانه میباشند. سرپنجه آنها بین پنج تا چهل و پنج درجه بداخل گرایش دارند. Kamisema is a basic stance of a Kung Fu TO’A. The person stands […]